Flying Your Drone
✎Modified 2021-07-14 by Andrea Censi
In order to fly, you will need:
- Fully assembled drone
- Charged battery
- Base station
- Safety goggles
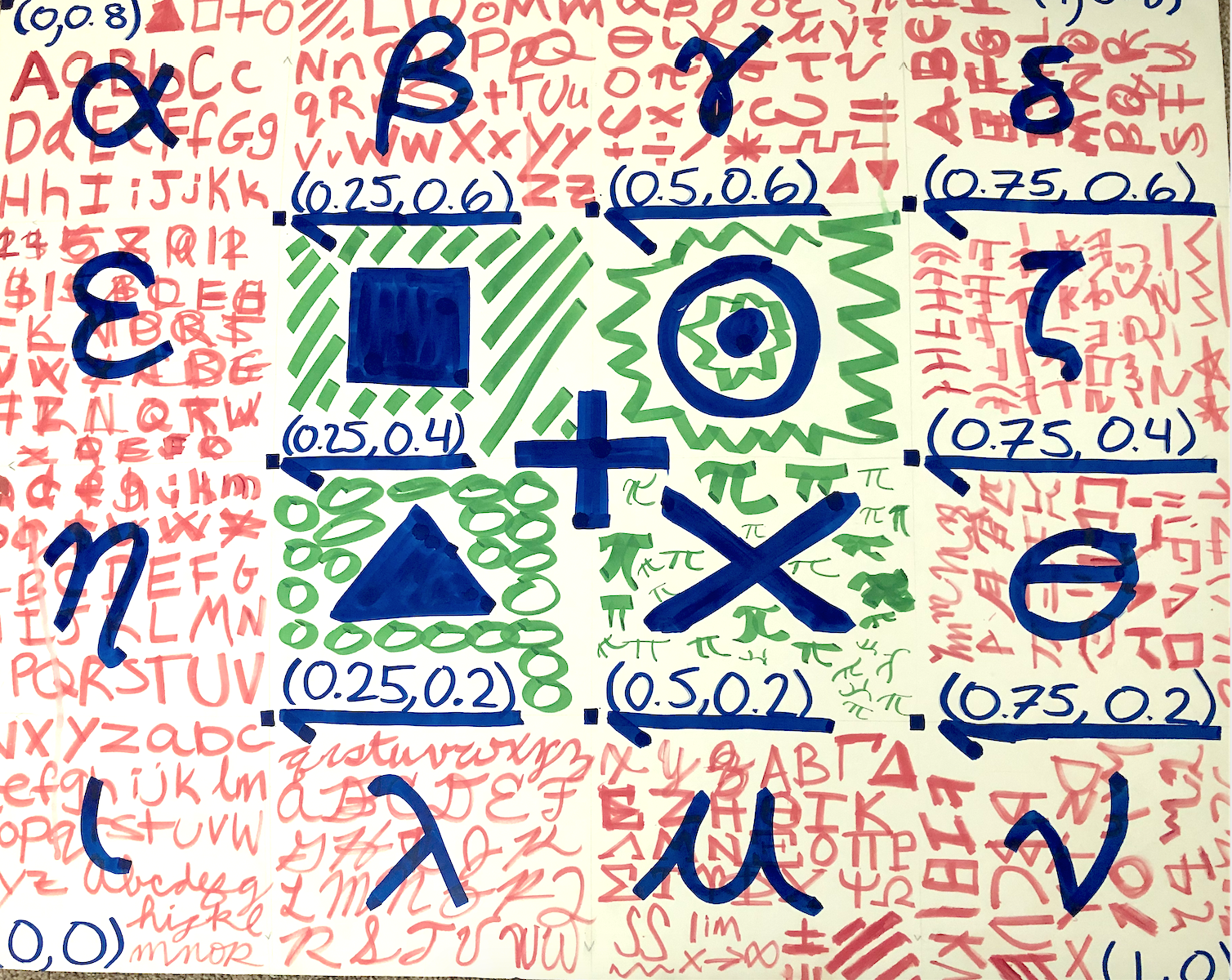
- Highly textured planar surface, such a poster board with scribbles. This should have considerable and distinct markings for the camera to process. Alternatively, a patterned carpet will work.
Environment Checks
✎Modified 2021-07-14 by Andrea Censi
-
You are in an open space that is free of obstructions
-
You’ve alerted those around you that you are going to fly and have told them to clear the area
-
You are wearing safety goggles
-
The surface you are flying over is not reflective, and is not uniform in details. Ideally, you’ve created a highly textured planar surface, which is a poster board with a bunch of scribbles and shapes. A patterned carped will work fine as well.
Hardware Checks
✎Modified 2021-07-14 by Andrea Censi
If not already, disconnect the battery before performing the following safety checks.
Wire Management
✎Modified 2021-07-14 by Andrea Censi
Spin the props with your finger and make sure there are no wires in the way. If wires do get close, use a zip tie to hold the wires to the frame, away from the props.
USB Connection
✎Modified 2021-07-14 by Andrea Censi
Make sure that the flight controller USB is plugged into the Pi. Any of the USB ports will work.
Software and Sensors Checks
✎Modified 2021-07-14 by Andrea Censi
Power
✎Modified 2021-07-14 by Andrea Censi
Plug the battery into your drone.
Connection
✎Modified 2021-07-14 by Andrea Censi
Connect to your drone’s wifi network. By default, the wifi is called defaultdrone and the password is bigbubba
Code Editor
✎Modified 2021-07-14 by Andrea Censi
In a new tab, browse to your drone’s code editor: 192.168.42.1:8081
Start the Flight Code
✎Modified 2021-07-14 by Andrea Censi
-
If there is not a terminal open at the bottom of the code editor, then open a new terminal: Menu (three horizontal lines in the top left) > Terminal > New Terminal
-
In the terminal, type type
roscd pidrone_pkgand press enter. -
Calibrate the accelerometer by typing
python scripts/calibrateAcc.pyand press enter. -
Start up the flight code by typing the command
./startand press enter.
Start the Flight Controller Node in Sensors-only Mode
✎Modified 2021-07-14 by Andrea Censi
-
In the terminal, navigate to the flight controller node by typing “tick 1”: `
1. The “tick” ` key is typically located to the left of the1key, and is on the same key as the tilde~. Note that you will not see anything appear when you are typing `1 -
Press enter to start the python script
-
When prompted, “Are you ready to fly?” type
nand press enter to run in sensors-only mode. This allows us to use the flight controller sensors without the chance of the motors spinning while we are testing the ir and camera sensor in the next steps.
Web Interface
✎Modified 2021-07-14 by Andrea Censi
-
In a new tab, browse to your drone’s web interface: http://192.168.42.1
-
Press connect on the web interface to connect to your drone. If the web interface does not say “connected”, then wait about 5 seconds and refresh the page
Check the IR Sensor
✎Modified 2021-07-14 by Andrea Censi
While looking at the Height Chart in the web interface, move the drone up and down and make sure you see changes in the IR graph on the web interface
Check the Camera
✎Modified 2021-07-14 by Andrea Censi
While looking at the X Velocity Chart in the web interface, move the drone to the left and right and verify that the graph changes. While looking at the Y Velocity Chart in the web interface, move the drone forward and back and make sure the graph changes.
Check the ROS Nodes
✎Modified 2021-07-14 by Andrea Censi
In the terminal of the code editor, go through each of the screens using ` n, where n is a number 1-5, and make sure there are no errors printed out. It is normal that there may be an error at the top of each screen that says something about not connecting to ROS master, but that is OK because it takes a bit for ROS to startup. Each screen should say “started” or “publishing”.
-
tick 1 is the flight controller node; you’ve already seen this one
-
tick 2 is the pid controller; this sends the roll, pitch, yaw, and throttle commands to the flight controller
-
tick 3 is the state estimator; this combines sensor data to estimate the state (position, velocity, orientation) of the drone
-
tick 4 is the camera node; this gets velocity and position data from the camera
-
tick 5 is the infrared node; this gets height readings from the IR sensor
Fly
✎Modified 2021-07-14 by Andrea Censi
Familiarize yourself with the keyboard commands
✎Modified 2021-07-14 by Andrea Censi
Find and read the keyboard commands to control the drone at the bottom of the web interface. The keyboard focus must be on the web page for these commands to work: you may need to click on the screen before typing the first keyboard command.
The primary keys you’ll need are the spacebar (to disarm the drone), the semicolon ; (to arm the drone), and t (to takeoff). The most important key is the spacebar.
If anything goes wrong be prepared to immediately hit spacebar to disarm the drone.
Other useful keys are i j k and l which allow you to fly the drone around. The drone will attempt to hover in one place, but if it moves too much to one side, you can steer it back to the center using these keys.
Orient the drone
✎Modified 2021-07-14 by Andrea Censi
Rotate the drone so that the camera end is facing towards you and the flight controller is facing away from you. In this way the keyboard controls (I,j,k,l) will match the drone’s orientation. I - foward (flight controller side), J - left, K - backward (camera side), L - right
Restart the Flight Controller Node for Flight
✎Modified 2021-07-14 by Andrea Censi
-
In the terminal in the code editor, navigate back to the flight controller node using tick 1.
-
Quit the flight controller node by typing control-c (hold down the ctrl key and press the c key)
-
Rerun the flight controller script by pressing the up arrow on your keyboard (this brings back the last script that was run) and then press enter
-
When prompted, “Are you ready to Fly?” type
yand press enter to start the flight controller node
Takeoff sequence
✎Modified 2021-07-14 by Andrea Censi
-
First arm your drone by pressing
;. The propellers should start spinning slowly. If they spin fast, or you hear strange noises, immediately disarm the drone. If they still do not spin, check the flight_controller_node. This is where any error message will be printed out. -
Disarm your drone (spacebar) and ensure that the propellers slow down almost immediately and then stop spinning. If there is a delay, then there is likely network latency and this could cause flight issues. If you are connected to the drones network and there is delay, try restarting the Pi. If you are connected to your home network and there is delay, restart the Pi and use the drone’s network to fly instead.
-
Try arming (
;) and disarming (spacebar) again to ensure that the drone is responsive. -
If all goes well, arm the drone again, then press
tto takeoff. Be prepared to disarm the drone if anything goes wrong. -
Move in the plane using
i,j,k,lon the keyboard. When not moving the drone will try to maintain zero planar velocity but may drift.
Congrats on flying!
Flying Modes
✎Modified 2021-07-14 by Andrea Censi
There are two modes of flight for the drone, velocity control and position control. In velocity control, the drone tries to maintain zero velocity in the x and y directions; however, the drone can drift over time using just a control loop on the velocity. In position control, the drone is able to prevent itself from drifting. Information on each mode is included below. This video shows velocity mode, where it drifts, followed by position mode, followed by velocity mode again.
Velocity Control
✎Modified 2021-07-14 by Andrea Censi
The default mode when starting is velocity mode, where the keyboard
commands control planar velocity. When no keys are pressed the
drone’s velocity setpoint is zero, so it tries to maintain still. It
estimates its velocity using the optical flow computed from the camera
frames. This estimate only works over a textured surface; when flying
over a non-textured surface it will cause the drone to inaccurately
estimate its velocity and fly out of control. A repeating texture is
fine, as long as it has texture (e.g., a carpet with a pattern).
Using just the velocity, the drone will tend to drift
over time. The key v activates velocity mode, and the
drone is always in this mode on when it starts flying.
Position Control
✎Modified 2021-07-14 by Andrea Censi
Because velocity mode can drift, we have implemented a position hold mode, where the drone computes its offset relative to automatically detected features from the downward pointing camera. This mode must be activated over a planar surface with a non-repeating texture, such as a poster board with scribbles in different colors and shapes. When position mode is activated, it takes a picture of the first frame, and then continuously estimates its offset from this frame. If it sees features in the first frame, it computes its position relative to the first image; otherwise it computes its position relative to the previous image it saw, and adds the change in position to its current position.
Type p to active position hold, and r to reset the first frame
where offsets are computed. A well-tuned drone can hold the same
position indefinitely on power, and for almost the entire battery
when on battery. (At the end of the battery it will oscillate more
and lose its position.)
When in position mode, the keyboard commands tell the drone to maintain a setpoint that is a defined offset from the origin, defined by the saved first frame. That is, if you fly left, it will try to hold its position a defined offset to the left of the first frame. Of course if the drone gets too far from the first frame, it can no longer compute a global estimate and will drift away. To rectify this problem, you need to compute a global map and localize in that map, as described in the next section.
If the drone drifts too far without being able to make a position estimate, the drone automatically switches back to velocity control. This is a safety feature and the threshold can be adjusted in the pidrone_pkg/params/thresholds.yaml file.