Software setup on the Duckiebot
✎Modified 2019-09-23 by AmaurX
Goal
✎Modified 2019-06-28 by Tomasz
In order to allow the duckiebot to have the autocharging capability. The duckiebot requires to run a container which does the following tasks.
1) The duckiebot has to be guided from any place on the map to the charging area.
2) At the charging area, it understands the instructions of the autocharging
manager, which directs it to the appropriate charging lane.
3) From the autocharging entrance the duckiebot follows the correct path to the charging lane
4) In the charging lane it successfully charges.
5) After charging the duckiebot navigates back to the city.
All these tasks are bundled in the megacity image. However, prior to running it, the appropriate paths of the autocharging area have to be setup.
Setting up container
✎Modified 2019-07-29 by Tomasz Z
Clone the following repository
git clone https://github.com/duckietown/rpi-autocharging-demo.git
cd rpi-autocharging-demo.git
open with an text editor the default.yaml file. The default.yaml file should have the following outline and structure:
# Maintenance gate
maintenance_entrance: {'62': 1, '143': 0}
maintenance_path: {'157': 1, '66': 0,'136': 2, '58': 1, '63': 0, '68': 2,'62': 1, '143': 0}
maintenance_exit: {'135': [1,2]}
maintenance_intersection: {'tag': 261}
# General path back to city
path_to_city: {'238': 1, '144':2, '260': 2, '149': 0, '153': 1, '237': 1, '236': 0, '242': 0, '61': 1}
# Charging station
charging_stations:
stop_signs: {'tag': [190, 193, 37, 194]}
station1:
path_in: {'261': 1, '235': 2, '240': 1}
path_calib: {'144': 2, '260': 1}
station2:
path_in: {'261': 2, '240': 0, '235': 1}
path_calib: {'236': 0, '153': 0, '243': 2}
station3:
path_in: {'261': 1, '235': 1, '240': 1}
path_calib: {'238': 1, '260': 1}
station4:
path_in: {'261': 2, '240': 1, '235': 1}
path_calib: {'237': 1, '153': 0, '243': 2}
entrances: {'235': [1,2], '240': [0,1]}
exits: {'144': [0,2], 236': [0,2], '238': [1,2], '237': [0,1]}
# Calibration station
calibration_station:
entrances: {'243': 2, '260': 1}
exits: {'242': [0,1]}
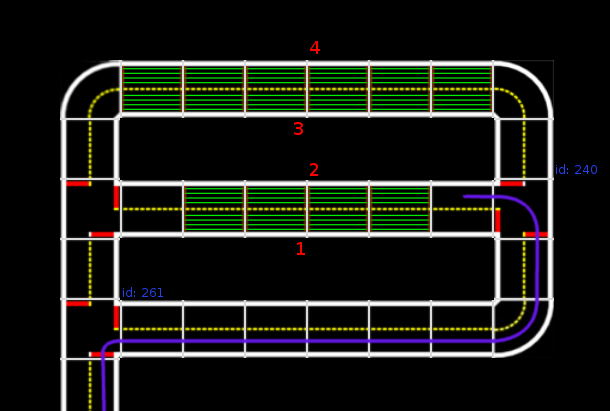
The parameters in the yaml file correspond to the following map:
picture of map
The parameters in the config file are dictionaries - each key (i.e. ‘150’) stands for an April tag ID and maps to either a single direction (i.e. 1) or to multiple directions, stored in a list (i.e. [0,1,2]). The directions, stored as integers, map as follows:
[0, 1, 2] == [LEFT, STRAIGHT, RIGHT].
Add your own paths
✎Modified 2018-08-22 by Julien Kindle
path_in
✎Modified 2019-09-24 by hosnerm
The “path_in” parameter of a charger should map traffic sign April tag IDs to a single turn type, which in sum guide the Duckiebot to the charger. In Figure 8.1 an example is given. The path_in of charger 2 would then be
path_in: {'261': 2, '240': 0}
path_to_city
✎Modified 2018-08-23 by Julien Kindle
The dictionary “path_to_city” guides a Duckiebot from every possible leaving position (i.e. charger exit, calibration exit) back to the city. In Figure 8.2, all paths are plotted for an example maintenance area (without a calibration area).

charging_stations: entrances, exits
✎Modified 2018-08-22 by Julien Kindle
The dictionary “entrances” and “exits” in the charging_stations parameter contains every entrance / exit to charging stations. This information is needed in the code to determine when a Duckiebot enters or leaves a charger.
maintenance_entrance / maintenance_exit
✎Modified 2019-09-24 by hosnerm
This dictionaries define which April tag IDs correspond to the entrance / exit of the maintenance area. This information is needed to detect when a Duckiebot enters or leaves the maintenance area.
After setting up all parameters our docker image is ready to be build
Push to your Docker account
✎Modified 2019-06-28 by Tomasz
we are building the docker file for your own charging area:
laptop $ docker build --rm -f "Dockerfile" -t /[your docker repository]/megacity:latest
[your docker repository] is the docker hub repository where the image will be saved, from which the image can be pulled to the duckiebot. example for generic autocharging area:
laptop $ docker build --rm -f "Dockerfile" -t /duckietown/megacity:latest
now we need to push to the remote repository on dockerhub
laptop $ docker push [your docker repository]/megacity:latest